更新时间:2020-12-10 20:04:11
在开发自动驾驶汽车的激烈竞争中,激光雷达已成为最关键的硬件组件之一。激光雷达系统生成精确的点云数据,作为周围环境的3D地图,以提高自动驾驶汽车的感知能力和安全性。然而,对于AI研究人员而言,激光雷达点云语义分割仍然是一大挑战。
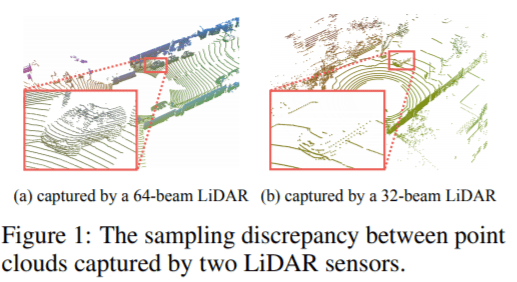
标注3D点云的缺乏阻碍了语义分割任务中深度神经网络性能的进一步提高。尽管一些自动驾驶公司发布了一些数据集,但激光雷达传感器的配置不同和其他域的差异导致了这一问题:在一个数据集上训练的深度网络在其他数据集上表现不佳。据外媒报道,为了弥补激光雷达传感器中3D点云采样差异造成的域差距,谷歌研究团队提出了一种新的“补全和标注”域适应方法,即激光雷达点云语义分割域适应方法(A Domain Adaptation Approach to Semantic Segmentation of LiDAR Point Clouds)。